Роботы, основанные на мягких материалах, часто лучше копируют внешний вид, движения и способности как людей, так и животных. Хотя в настоящее время существует бесчисленное множество мягких роботов, многие из них трудно производить в больших масштабах из-за высокой стоимости их компонентов или сложного процесса изготовления.
Исследователи из Университета Коимбры в Португалии недавно разработали новую мягкую роботизированную руку, которая может быть более доступной по цене и простой в изготовлении. Их конструкция, представленная в системах Cyborg и Bionic, объединяет мягкие приводы с экзоскелетом, оба из которых могут быть изготовлены с использованием масштабируемых технологий.
“Большинство роботов сделаны из жестких материалов”, – сказал Tech Xplore Педро Нето, один из исследователей, проводивших исследование. “Однако, когда мы наблюдаем за животными, мы замечаем, что их тела могут состоять из твердых частей (скелетов) и мягких частей (таких как мышцы). Некоторые животные, например дождевые черви, полностью мягкотелые. Черпая вдохновение в природе, мы ожидаем, что следующее поколение роботов будет включать компоненты, изготовленные из мягких материалов, или, в некоторых случаях, они могут быть полностью мягкотелыми”.
По сравнению с жесткими роботами, мягкие роботизированные системы могли бы быть более безопасными и лучше сосуществовать с людьми или животными как на открытом воздухе, так и внутри помещений. Например, если они сталкиваются с людьми, животными или объектами в своем окружении, у этих роботов меньше шансов нанести значительный ущерб или травмы.
Ключевой целью недавней работы Нето и его коллег была разработка новой мягкой роботизированной руки, которая была бы одновременно безопасной и доступной по цене. Теоретически такую руку было бы легче использовать в больших масштабах, что способствовало бы новым исследованиям и инновациям в области робототехники.
“Мы использовали анализ методом конечных элементов для оптимизации конструкции перед физическим изготовлением руки, что позволило снизить затраты на прототипирование”, – пояснил Нето. “Использование обычной 3D-печати доказало свою эффективность благодаря прямой печати некоторых компонентов из мягких материалов и печатных форм из жестких материалов”.
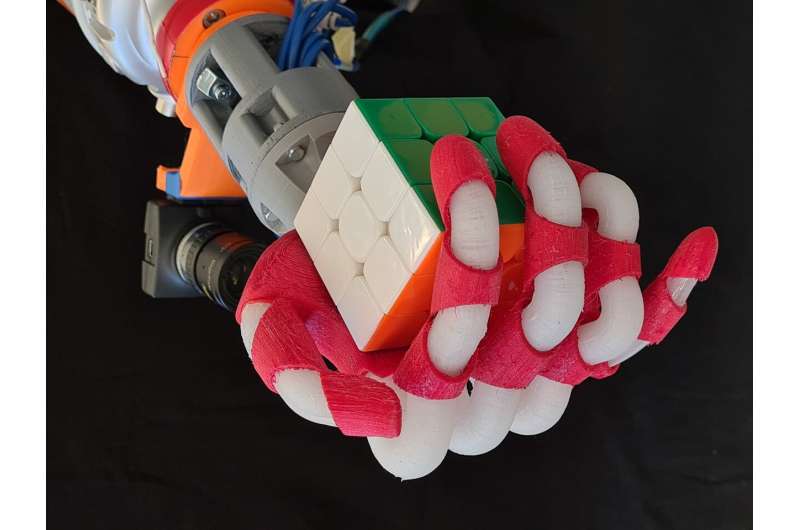
Мягкая роботизированная рука, созданная Нето и его коллегами, основана на нескольких различных материалах. Его тщательно продуманная структура была призвана имитировать внешний вид и функциональность человеческих рук, воспроизводя их движения и способности.
“Конфигурация роботизированной руки состоит из пяти мягких приводов, каждый из которых соответствует пальцу, и экзоскелета, способствующего сгибанию пальца”, – сказал Нето. “Контроллер ВКЛЮЧЕНИЯ-выключения поддерживает заданные углы сгибания пальцев, позволяя руке эффективно захватывать предметы различной формы, веса и размеров”.
До сих пор исследователи оценивали работу своей роботизированной руки в серии симуляций и экспериментов. Их первоначальные результаты весьма многообещающи, поскольку рука может успешно захватывать множество предметов различной формы, веса и размеров.
“Основным вкладом является интегрированная система проектирования и изготовления, которая использует анализ методом конечных элементов для оптимизации конструкции перед их изготовлением”, – сказал Нето. “Это достижение потенциально может повысить доступность мягких роботизированных рук при одновременном снижении затрат и устранении обычно трудоемких процедур проектирования и изготовления, которые часто основаны на ресурсоемких итеративных рабочих процессах”.
В будущем мягкая роботизированная рука, разработанная этой командой исследователей, может быть использована как академическими командами, так и отдельными робототехниками для тестирования новых алгоритмов искусственного интеллекта (ИИ) и других вычислительных инструментов, направленных на развитие способностей роботов. Кроме того, его конструкция могла бы открыть новые возможности для недорогого изготовления человекоподобных роботов, которые могли бы помогать людям в их повседневной деятельности.
“Наши следующие исследования будут сосредоточены на совершенствовании изготовления мягких приводов и датчиков, направленных на повышение доступности мягких роботов для более широкой аудитории”, – добавил Нето. “Управление мягкими роботами с использованием искусственного интеллекта – еще одна исследовательская тема, над которой мы работаем”.