Небольшая команда инженеров-механиков из Университета Карнеги-Меллон, работая с коллегой из Иллинойского университета Урбана-Шампейн, спроектировала и построила то, что они описывают как самого простого шагающего робота из когда-либо существовавших. Они написали статью, описывающую идеи, которые они использовали при создании робота, и факторы, которые привели к его простоте, и разместили ее на сервере препринтов arXiv.
В течение последних нескольких десятилетий инженеры-робототехники работали над созданием роботов, которые могли бы ходить на двух ногах и делать это так же плавно, как животные или люди. До сих пор такие усилия оказывались плодотворными, но конечная цель еще не достигнута. Роботы по-прежнему ходят как роботы.
По мере продвижения работ по проектированию шагающих роботов развивалось множество инженерных разработок, связанных с двигателями, гидравликой, технологическими чипами и различными другими деталями. Результаты, как правило, были исключительно сложными, изощренными и дорогостоящими. Из-за этого многие задавались вопросом, не существует ли менее сложного способа делать что-то. В этой новой работе исследовательская группа применила совершенно новый подход к проблеме и, таким образом, нашла способ значительно упростить функции, необходимые для того, чтобы робот мог ходить на двух ногах.
Работа команды была вдохновлена работой канадского инженера Тэда Макгира — еще в конце 1980-х годов он построил простого робота, у которого не было двигателей, приводов или компьютеров для управления его движениями. Вместо этого была разработана конструкция, которая позволяла роботу легкой походкой спускаться по слегка наклонной плоскости. Исследователи отмечают, что это стало возможным благодаря грамотному использованию баланса и силы тяжести в конструкции.
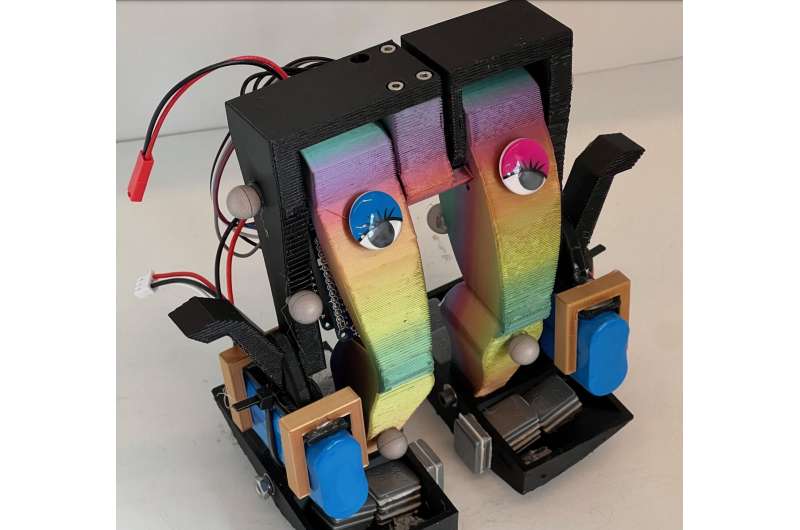
По-новому взглянув на такой подход, исследователи в рамках этой новой работы разработали аналогичного робота, который мог ходить по ровной поверхности, благодаря всего одному приводу. Их идея состояла в том, чтобы создать робота, состоящего только из соединенных вместе ног, который мог бы ходить. В результате получился робот, которого они назвали Мугату.
У него две ножки, соединенные вверху вместе. У каждой ноги есть ступня на нижнем конце, но нет колена. Все его части были спроектированы таким образом, чтобы использовать преимущества силы тяжести — например, ступни были сформированы таким образом, что позволяли роботу катиться взад и вперед, а также слегка поворачиваться в ту или иную сторону.
Ноги также были соединены таким образом, чтобы центр тяжести робота всегда находился ниже центра кривизны каждой ступни. Это означало, что если робот терял равновесие, он всегда возвращался в вертикальное положение. Они также добавили еще одну функцию — когда робот стоит, поставив ноги вместе, он всегда слегка отклоняется назад, позволяя ноге подниматься, даже не упираясь в землю.
Конечным результатом является робот, все части которого сбалансированы таким образом, что он может ходить, не падая, при использовании всего одного привода в качестве источника питания. Дизайн также оказался высокоэффективным с точки зрения экономии энергии. В заключение команда предполагает, что их разработка — это всего лишь первый шаг в создании нового типа двуногого робота, который больше полагается на конструкцию ног, чем на способы их перемещения.